Pullup-, Pulldown-Widerstand
Massnahmen zur Entstörung bei langer Leitung
Openkollektor - Wired-OR - Latchup-Risiken
Was ist ein Pullup- und ein Pulldown-Widerstand?
Pull heisst bekanntlich ziehen, Up heisst rauf und Down heisst runter. Ein Pullup-Widerstand zieht also etwas hinauf und ein Pulldown-Widerstand zieht etwas hinunter. Genau so einfach ist es. Der eine zieht die elektrische Spannung hinauf und der andere zieht sie hinunter. Das Hinaufziehen geht dabei meist bis zum Betriebsspannungswert +Ub und das Hinunterziehen hinunter auf GND, oder im Falle einer symmetrischen Betriebsspannung mit ±Ub auf -Ub. Damit wäre eigentlich schon alles geklärt, wenn es nicht etwas komplizierter wäre...
Es gibt zwei Möglichkeiten einen Taster mit einem logischen Gatter zu
verbinden. Will man dafür sorgen, dass der Eingangspin logisch LOW
erhält, wenn die Taste gedrückt wird, so gilt Teilbild 1.1. Der Kontakt
liegt zwischen dem Eingang des Gatters und GND. Es kann anstelle des
Tasters auch ein Schalter sein. Der Pullup-Widerstand liegt zwischen dem
Eingang und +Ub. Beim Öffnen des Tasters zieht der Pullup-Widerstand die
Spannung am Eingang hoch bis zum Betriebsspannungswert +Ub, was logisch
HIGH entspricht. Das Gatter selbst ist selbstverständlich mit der selben
Betriebsspannung +Ub und GND gespiesen und das gilt für alle folgenden
Bilder, wo die Speisung nicht speziell gekennzeichnet ist.
Will man dafür sorgen, dass der Eingang logisch HIGH erhält, wenn die
Taste gedrückt wird, gilt Teilbild 1.2. Der Kontakt liegt zwischen dem
Eingang und +Ub. Der Pulldown-Widerstand liegt zwischen dem Eingang und
GND. Beim Öffnen des Kontaktes zieht der Pulldown-Widerstand die
Spannung am Eingang hinunter auf GND, was logisch LOW entspricht. LOW
oder HIGH wird am Eingang nur dann per Widerstand erreicht, wenn es ein
CMOS-Eingang ist, weil dieser extrem hochohmig ist. Bei TTL-Bausteinen
ist dies nicht der Fall, wie wir noch sehen werden.
Es werden hier Eingänge von NAND-Gattern gezeigt. Natürlich können dies
auch andere digitale Eingänge sein, wie z.B bei einem Flipflop, Zähler
oder Schieberegister. Bei der Anwendung von Pullup- und
Pulldown-Widerständen geht es ganz einfach immer darum, dass bei einem
offenen Kontakt der korrekte logische Eingangspegel garantiert ist.
Darauf werden wir noch näher eingehen.
Ein Pullup- oder Pulldownwiderstand kommt auch bei einer Steuerung
mittels Transistor zum Einsatz, der ähnlich einem Schalter dem Ein- und
Ausschalten dient. In diesem Fall ist der Pullup- oder
Pulldownwiderstand auch ein Kollektorwiderstand. Ein Widerstand im
Kollektorkreis einer Schalt-Transistorstufe, dargestellt in den
Teilbildern 1.3 und 1.4. Häufig findet man die Schaltung in Teilbild
1.3. Ein NPN-Transistor in der Funktion eines Openkollektor-Ausganges,
integriert z.B. in einem
Optokoppler.
Siehe Skizze unter "Gleichstrom-Übertragungsverhältnis".
Das RS-Flipflop
Das RS-Flipflop ist eine typische Anwendung für Pullup- oder Pulldown-Widerstände. Immer dann wenn mechanische Kontakte - hier Taster - zur Anwendung kommen, sind diese Pullup- oder Pulldown-Widerstände notwendig, um den Logikpegel bei offenem Kontakt sicher zu stellen. Sollte der Leser nicht wissen was ein RS-Flipflop ist, so mache er sich bitte schlau in Patrick Schnabels RS-Flipflop-Grundkurs in:
Auf dieser Seite wird je ein RS-Flipflop mit zwei NAND- und zwei NOR-Gattern vorgestellt. Bild 2 (hier) illustriert zusätzlich die Pullup- und Pulldown-Widerstände. Die Dimensionierung dieser Widerstände wird weiter unten thematisiert.
Der prellfreie Schalter mit RS-Flipflop
Der prellfreie Taster oder prellfreie Schalter, zeigt Bild 3 in den
Ausführungen mit einem NAND-RS- und einem NOR-RS-Flipflop. Dies ist eine
sehr typische Anwendung für RS-Flipflops mit Pullup- und
Pulldown-Widerständen. Nachteilig ist, dass man einen Umtaster, bzw.
Umschalter, einsetzen muss. Einen prellfreien Taster oder Schalter mit
nur einem Arbeitskontakt muss mit einem Monoflop realisiert werden,
dessen Impulsdauer grösser ist als die Prellzeit.
RS-Flipflop entstören: Wie man ein RS-Flipflop in einer stark
EMV-verstörten Umgebung, z.B. in einer Steuerungsanwendung im
230-VAC-Bereich, desensibilisiert, zeigt folgender Elektronik-Minikurs
(Bilder 4, 5 und 6):
TTL war früher, (H)CMOS ist heute
Die Transistor-Transistor-Logik (TTL) wird hier bloss noch vollständigkeitshalber thematisiert. Für neue Projekte werden nicht mehr Standard-TTL, LS-TTL oder ALS-TTL eingesetzt. Wer trotzdem mehr zu diesen Bausteinen, jedoch auch einiges über (H)CMOS erfahren möchte, empfehle ich meinen Artikel aus dem Jahre 1992 in:
Standard-TTL und die Pullup- und Pulldown-Widerstände
Bild 4 zeigt zwei Standard-TTL-Eingänge. Teilbild 4.1 mit einem Pullup-
und Teilbild 4.2 mit einem Pulldown-Widerstand beschaltet.
Betrachten wir zuerst Teilbild 4.1. Wie gross muss Rpu (Resistor-pullup)
sein? Im Prinzip kann er beinahe beliebig gross dimensioniert werden
oder man könnte auf ihn auch ganz verzichten. Bei offenem Eingang
fliesst ein T1-Basisstrom, begrenzt durch R1, über die
T1-Basis-Kollektor-Diode in die Basis von T2. T2 und T4 leiten und T3
ist offen. Der Ausgang des TTL-NAND-Gatter liegt damit auf logisch LOW.
Wenn Rpu eingesetzt wird, steigt die Spannung am Eingang auf die
Betriebsspannung von +5 VDC. Damit wird der Störabstand des NAND-Gate
verbessert, was sich besonders bei langen Leitungen am Eingang
störsicherer auswirkt. Der Emitter-Kollektor-Sperrstrom des T1 ist so
gering, dass Rpu relativ hochohmig gewählt werden kann. 100 k-Ohm sind
zwar möglich, empfohlen werden jedoch Werte zwischen 5 und 10 k-Ohm. Zu
hohe Rpu-Werte erhöhen durch Einkopplung mittels parasitärer
Leitungskapazitäten die Störempfindlichkeit.
Betrachten wir jetzt das Teilbild 4.2. Wie gross muss Rpd
(Resistor-pulldown) sein? Hier fliesst ein T1-Basisstrom über einen der
beiden T1-Emitter und Rpd nach GND. Aus T1 fliesst kein Kollektorstrom
wenn einer der beiden Emitter von T1 auf GND-Pegel liegt, weil die Basis
von T2 über die leitende Kollektor-Emitterstrecke von T1 ebenfalls auf
GND gezogen wird. Der Basisstrom Ib von T1 entspricht dem Emitterstrom
Ie von T1.
Dieser Strom erzeugt in Rpd einen Spannungsabfall und dieser darf gemäss
Datenblatt 0.8 VDC nicht überschreiten. Der durch R1 begrenzte Strom
liegt bei maximal 1.1 mA. Damit die Spannung von 0.8 VDC am Eingang
nicht überschritten wird, darf Rpd nicht grösser als 720 Ohm sein. Es
werden in der Praxis allerdings Werte unter 500 Ohm, in der Regel ein
Widerstand von 390 Ohm, empfohlen.
Bei der Anwendung von Pulldown-Widerständen zeigt sich bei
Standard-TTL-Schaltungen sogleich ein gravierender Nachteil: Der Strom
ist bei geschlossenem Taster- oder Schaltkontakt relativ gross. Bei
einem Rpd-Wert von 390 Ohm resultiert ein Strom von 13 mA. Im Gegensatz
dazu erzeugt ein Rpu-Wert von 10 k-Ohm bei geschlossenem Kontakt bloss
0.5 mA. Besonders dann wenn eine grosse Menge von Schaltern zum
Einsatz kommt, zeigt sich der Vorteil beim Einsatz von
Pullup-Widerständen.
LS-TTL und die Pullup- und Pulldown-Widerstände
Auch diese Logik ist sehr alt (LS=Lowpower-Schottky) und es gab auch
längst die ALS-TTLs (A = Advanced) welche die LS-TTLs verdrängte. Diese
ALS-TTL-Bauseine sind schneller als die LS-TTLs, benötigen jedoch
unwesentlich mehr Leistung. Aber uns interessiert hier nur die
Angelegenheit der Pullup- und Pulldown-Widerstände.
Betrachten wir zunächst das Schaltbild in Teilbild 5.1. Schottky-Dioden
schalten wesentlicher schneller um vom sperrenden in den leitenden
Zustand und umgekehrt. Die Durchfluss-Schwellenspannung beträgt nur etwa
0.3 bis 0.4 VDC, während es bei herkömmlichen Siliziumdioden etwa 0.6
bis 0.8 VDC sind. Betreffs Rpu gelten etwa die selben Überlegungen wie
zur Teilschaltung 4.1. Gleichgültig wie hoch Rpu ist, die Diode liegt in
Sperrrichtung und es fliesst bloss ein irrelevant geringer Sperrstrom.
Trotzdem sollte man es mit dem Wert des Rpu, aus dem Grund wie bereits
beschrieben, nicht übertreiben.
In Teilbild 5.2 wirkt Rpd und es fliesst ein Strom durch den
stromlimitierenden Widerstand R1, Schottky-Diode D1 und Rpd nach GND. R1
ist in LS-TTL-Schaltungen allerding fünf mal grösser als in
Standard-TTL-Schaltungen. Daher darf Rpd mit 1.8 k-Ohm auch etwa fünf
mal grösser sein.
Was ist ein Schottky-Transistor
Dies ist im Grunde nichts anderes als ein ganz normaler
schnellschaltender NPN-Transistor kombiniert mit einer Schottky-Diode
zwischen Basis und Kollektor. Wozu soll denn das dienen? Ganz einfach,
es wird verhindert, dass der Basisstrom des Transistors unnötig gross
wird. Sobald beim Anstieg des Basisstromes der Kollektorstrom in
Funktion des Stromverstärkungsfaktores zunimmt, sinkt die
Kollektor-Emitter-Spannung. Wird diese Spannung niedriger als die
Flussspannung der Schottky-Diode, fliesst ein Teil des Stromes anstatt
zur Basis über die Diode zum Kollektor. Dadurch wird wirksam verhindert,
dass der Transistor in die Sättigung gesteuert wird. So müssen nach
Wegfall des Basisstromes weniger Ladungsträger aus der Basis
"ausgeräumt" werden und der Transistor schaltet schneller aus.
Man kann diesen Trick auch mit herkömmlichen Siliziumdioden realisieren.
Allerdings arbeitet die Schaltung dann langsamer und die minimale
Kollektor-Emitter-Spannung ist höher.
Pullup- und Pulldown-Widerstände an CMOS-Eingängen
Offene TTL-Eingänge sind prinzipiell logisch HIGH, auch wenn dies nicht
ganz unproblematisch ist, wie wir weiter oben gelesen haben. Wie sieht
dies mit CMOS-Eingängen aus? Die Oxydschicht zwischen Gate und Source
ist ein perfekter Isolator. Ein Eingangswiderstand von 1012
Ohm ist selbstverständlich. Was hindert uns also für Rpu und Rpd Werte
im M-Ohm-Bereich zu wählen? Im Grunde nichts, wenn da nicht einige
Kriterien aus der Praxis zu berücksichtigen sind. Wenn durch
Verschmutzung Kriechstrecken entstehen, nimmt an dieser Strecke der
Widerstand ab. Passiert dies zwischen den Kontakten eines Schalters oder
Tasters, dann haben wir einen Spannungsteiler der entweder aus Rpu und
dem offenen Kontaktübergangswiderstand (Teilbild 7.1) oder aus Rpd und
dem offenen Kontaktübergangswiderstand (Teilbild 7.2) besteht. Dadurch
wäre die korrekte logische Eingangsspannung nicht mehr gewährleistet.
Betreffs Grösse von Rpu und Rpd kommt es ganz auf die Anwendung an. Im
Normalfall eignen sich gut Werte von 10 bis einigen 100 k-Ohm. Im
nächsten Kapitel befassen wir uns mit dem Störrisiko bei langen
Leitungen zwischen der Kontaktstelle und der Elektronik und wir
überlegen uns was im Falle des Batteriebetriebes zu beachten ist. Diese
Situation weicht etwas vom Normalfall ab.
Störsichere Gate-Eingangsschaltung eines CMOS-IC
Wie funktioniert diese Schaltung? R1 ist der Pullup-Widerstand. Beim
Öffnen des Kontaktes und bei offenem Kontakt wirkt die Zeikonstante R1*C
mit 10 ms. Bei diesem Wert können selbst massive kapazitive
Einkopplungen auf die lange Leitung von niederfrequenten Signalen kaum
stören. Hochfrequente Störsignale haben eh keine Chance, vorausgesetzt
allerdings, dass C kein Wickel- sondern ein Keramikkondensator ist.
Dieser hat eine speziell niedrige parasitäre Eigeninduktivität.
Man sollte hier auf eine relativ grosse R1*C-Zeitkonstante achten, denn
bei einem hochohmigen Eingang und bei der Verwendung einer sehr langen
Leitung, können auch mittel- und niederfrequente Einkopplungen stören.
Bei geschlossenem Tasten- oder Schalterkontakt ist der Eingang
niederohmig. Der sehr niedrige Widerstand, bestehend aus Kontakt und
Leitung, dominiert. Wir dürfen aber nicht vergessen, dass die Leitung
auch eine gewisse Induktivität besitzt. Sie ist eine parasitäre Spule
mit einer Windung. Dies ist, extrem betrachtet, auch dann der Fall wenn
eine parallele Zweidrahtleitung verwendet wird. Allerdings ist dann die
Antennenwirkung sehr gering. Wollen wir aber auch gleich diesem Problem
vorbeugen, so schalten wir in Serie zum Eingang R2 mit einem Wert von
z.B. 10 k-Ohm. R2 erzeugt mit C eine Zeitkonstante von 0.33 ms. Dies
dürfte ausreichen, da bei geschlossenem Kontakt eine niedrige Impedanz
vorliegt, bei der nur hochfrequente bzw. steilflankige Einkopplungen
überhaupt wirksam werden können. Der passive Tiefpass aus R2*C dämpft
dies wirksam. R2 hat aber noch einen anderen Zweck. Ohne R2 bildet sich
aus der Leitungsinduktivität und C ein eher schwach gedämpfter
Schwingkreis, der durch eine steilflankige Störeinkopplung angeregt
werden könnte. Die daraus resulierende Amplitude könnte zu einer
Fehltriggerung des nachgeschalteten Systemes führen. Mit R2 erreicht man
eine wirksame Dämpfung dieses parasitären Schwingkreises.
Aber wozu braucht es jetzt noch R3, neigt der aufmerksame Leser sich zu
fragen. Das ist ganz einfach: Nehmen wir an, es kommt auf der langen
Leitung zu einem Überspannungsimpuls, dann könnte der Stromimpuls durch
die Schutzdioden D1 und D2 kurzzeitig so gross werden, dass ohne R3 die
ebenso kurzzeitig erhöhte Durchfluss-Spannung der IC-internen
Schutzdioden überschritten wird. Die Folge davon wäre ein Latchup-Effekt
des CMOS-IC. Dieser führt bekannterweise zum Kurzschluss durch die
Zündung eines IC-internen parasitären Thyristors und zerstört das IC.
Mit R3, der durchaus auch grösser gewählt werden kann, wird der
Eingangsstrom ins Gate, im Falle einer Eingangsspannung unterhalb von
GND oder oberhalb von +Ub, so weit begrenzt, dass der Latchup-Effekt
sicher nicht auftreten kann. Sicher, weil die Eingänge der CMOS- und
HC(T)MOS-Familien bereits integrierte Widerstands-Dioden-Netzwerke
enthalten, die jedoch möglichst nicht überstrapaziert werden sollen.
Daher lohnt es sich stets vor dem Eingang zusätzliche Massnahmen zu
treffen, wie dies in Bild 8 gezeigt wird.
Betreffs Überspannungsschutz an elektronisch sensiblen Eingängen
empfiehlt sich auch der Elektronik-Minikurs
Überspannungsschutz von
empfindlichen Verstärkereingängen. Es geht dabei zwar um Opamps,
jedoch das Prinzip ist das selbe. R2 in Bild 8 hat die selbe Bedeutung
wie R3 hier zufällig ebenfalls in Bild 8.
Es sei noch vollständigkeitshalber darauf hingewiesen, dass die
Massnahme in Bild 8 als Überspannungsspannungsschutz gegen eine starke
elektrostatische Entladung, induziert z.B. durch eine indirekte
Blitzentladung in der Nähe, nicht ausreicht!
Schmitt-Trigger: Wozu werden in Bild 8 für das NAND-Gate
Schmitt-Trigger-Versionen z.B. CD4093, 74HC132 und 74HCT132 empfohlen?
Vor allem beim Öffnen des Kontaktes ist die Flankensteilheit am
Gate-Eingang, wegen der hohen Zeitkonstante von 10 ms, sehr niedrig.
Aber auch beim Schliessen des Kontaktes mit 0.33 ms ist der Wert noch
immer zu niedrig. Dies kann, wenn das Gate keine
Schmitt-Trigger-Funktion aufweist, während des Schaltvorganges zu
kurzzeitigen unkontrollierten Schwingungen am Ausgang des Gate kommen.
Wenn die nachfolgende Schaltung ein einfaches RS-Flipflop ist, macht das
keine Probleme, weil dieses Flipflop schliesslich nur einmal gesetzt
oder einmal zurückgesetzt werden kann. Anders sieht es aus, wenn ein
Toggle-Flipflop, ein Counter oder Schieberegister mit dem fernen Taster
getaktet werden soll. Dann erzeugen die kurzzeitigen Schwingungen
sogleich mehrfaches Takten und die Folge davon sind falsche digitale
Werte. Bei solch digitalen Schaltkreisen darf man allerdings nicht
vergessen, dass eine einfache Taster-Schaltung nicht genügt. Es wird
eine prellfreie Tasterfunktion, z.B. eine solche wie Bild 3 zeigt,
benötigt.
Pullup-, Pulldown-Widerstand und Batteriebetrieb
Eine CMOS-Schaltung braucht im Ruhezustand bekanntlich keine
signifikante Leistung. Man braucht also nur dafür zu sorgen, dass eine
CMOS-Schaltung keine Taktfrequenz erhält, und die Schaltung braucht
nicht extra per Hauptschalter von der Batterie getrennt zu werden. Wie
aber sieht es beim Gebrauch von Pullup- und Pulldown-Widerständen aus?
Wenn der Kontakt im Auszustand gerantiert offen ist, gibt es kein
Problem, denn wenn die CMOS-Schaltung unter Batteriespannung steht,
fliesst kein Gatestrom. Bei geschlossenem Kontakt fliesst allerdings ein
Strom durch den Pullup- oder Pulldown-Widerstand. Kann man den
geschlossenen Kontakt nicht vermeiden, muss man dafür sorgen, dass der
Pullup- oder Pulldown-Widerstand sehr hochohmig ist und man muss
staubgeschützte Kontakte und Anschlüsse verwenden, damit der Widerstand
zwischen den Kontakten um Grössenordnungen hochohmiger bleibt, als der
Pullup- oder Pulldownwiderstand, wenn der Kontakt geöffnet ist.
Angenommen die CMOS-Schaltung wird aus einer 9V-Block-Batterie betrieben
und man wählt einen Pullup- oder Pulldown-Widerstand von 1 M-Ohm,
fliesst ein Strom von 9 µA bei geschlossenem Kontakt. Bei einer
Batterie-Kapazität von 400 mAh (soviel hat etwa eine
Alkali-Mangan-9V-Blockbatterie), beträgt die Lebensdauer der Batterie,
wenn die Schaltung selbst nie in Betrieb ist, etwa 44'000 Stunden und
das sind 5 Jahre. Dies ist in der Regel mehr als die Lagerfähigkeit
einer solchen Batterie bei Raumtemperatur. Der Selbstentladedestrom der
Batterie ist grösser. Ein Pullup- oder Pulldown-Widerstand von 1 M-Ohm
wäre also sicher zumutbar, er dürfte allerdings auch halb so gross sein.
Elektrostatischer Einfluss auf ein offenes CMOS-Gate
Was passiert wenn ein TTL-Eingang offen ist? Nichts. Er ist auf logisch
HIGH definiert. Einzig der Störabstand ist veringert, wenn am Eingang
eine Leiterbahn oder eine Leitung angeschlossen ist. Was passiert aber
wenn ein CMOS-Eingang offen ist? Viel!
Der Eingang ist extrem hochohmig. Ohne externe Einflüsse ergibt sich die
Eingangsspannung aus den ebenso extrem hochohmigen Übergangswiderständen
zwischen Anschlusspin und GND und Anschlusspin und +Ub. Liegt die
Spannung beim halben Wert von +Ub kommt die CMOS-Schaltung in den
leitenden Zustand, weil der N-Kanal- und der P-Kanal-MOSFET von der
Endstufe gleichzeitig dauernd leiten. Der Strom liegt bei der
CD4xxx-IC-Familie bei einigen Milliampere pro CMOS-Gatter. Es leuchtet
natürlich ein, dass ein solch offener CMOS-Eingang den Betrieb der
Schaltung massiv stört. Facit: Man muss immer ein Pulldown- oder ein
Pullup-Widerstand einsetzen, der, wie wir jetzt wissen, unter bestimmten
Voraussetzungen auch relativ hochohmig sein darf.
Ein offener CMOS-Eingang ist aber auch der Willkür freier elektrischer
Felder ausgesetzt. Dazu kann man sich mit Bild 9 selbst ein
eindrückliches aber einfaches Experiment aufbauen:
Wenn der Eingang des CMOS-NAND-Gatters auf LOW gesetzt ist, liegt sein
Ausgang auf HIGH. Es fliesst ein Strom durch in die Basis des
Transistors T der verstärkt wird. Daher fliesst ein Emitterstrom und die
LED leuchtet. R begrenzt den LED-Strom. Nun lassen wir den Eingang
offen, schliessen lediglich einen etwa 10 cm langen Draht an den Pin und
sorgen dafür, dass er frei in der Luft liegt. Nun kämmen wir mit einem
Kunstoffkamm unser Haar, das trocken sein muss, oder wir reiben einen
Kunststoffstab, z.B. Plexiglas oder PVC, an einem trockenen Wolltuch.
Wir führen den elektrostatisch geladenen Kamm oder Stab in die Nähe des
freistehenden Drahtes. Eine Distanz von fünf bis zehn Zentimeter genügt.
Nun bewegen wir den Kamm oder den Stab leicht hin- und her in Richtung
des Drahtes und beobachten wie im selben Rythmus die LED aufleuchtet und
erlischt. Bewegen wir den Kamm oder den Stab ganz langsam, können wir
sogar die Helligkeit der LED etwas steuern. Dies braucht allerdings
etwas Übung.
Für ein besonders wirksames Experiment im Schulzimmer kann man anstelle
des bipolaren Kleintransistors T und einer LED einen Power-MOSFET
verwenden und damit eine 12-Volt-Autobirne ansteuern. Man braucht dazu
allerdings eine 12VDC-Spannungsquelle welche gut 4 Ampere liefert, z.B.
ein kleiner Bleiakku.
Unbenutzte Logik-Eingänge
Pullup/Pulldown-Widerstände, ja oder nein: In einem Thread im ELKO-Forum wurde zum Thema unbenutzte CMOS-Eingänge am Beispiel eines MOS-Zählers diskutiert. Dies veranlasste mich diesen Elektronik-Minikurs mit diesem Thema abzurunden.
Es gilt generell für TTL und CMOS-ICs, dass unbenutzte Eingänge auf HIGH
oder LOW geschaltet werden, je nachdem welchen Einfluss sie haben
sollen. Teilbild 10.1 zeigt die Schaltung A mit zwei logischen
Ausgängen, die mit einem NAND-Gate zu verknüpfen sind. Da nur ein
unbenutztes NAND-Gate mit drei Eingängen zur Verfügung steht, muss der
dritte unbenutzte Eingang so beschaltet sein, dass dieser die logische
Verknüpfung des beiden A-Ausgänge nicht beeinflusst. Dies ist der Fall,
wenn der dritte Eingang auf HIGH gesetzt ist. Im Fall von Teilbild 10.2
ist es gerade umgekehrt. Der dritte Eingang muss auf GND gesetzt sein,
damit die NOR-Funktion mit nur zwei Eingängen unbeeinflusst bleibt.
Wie wir bereits wissen muss ein TTL-Eingang, der logisch HIGH
entsprechen muss, nicht unbedingt mit HIGH verbunden sein. Trotzdem
sollte man es tun wegen dem besseren Störabstand. Bei CMOS darf kein
Eingang offen sein (Grund: siehe weiter oben). Warum sind keine Pullup-
und Pulldown-Widerstände notwendig, wie dies die Teilbilder 10.3 und
10.4 zeigen? Ganz einfach, weder im Betriebszustand, noch in der Ein-
und Ausschaltphase ist es möglich, dass die Eingangsspannung des
unbenutzten Einganges negativer sein kann als GND und ebenso wenig
positiver sein kann als +Ub. Es muss kein Strom in das Gate hinein
begrenzt werden. Man beachte in den Datenblättern die sogenannten
Worstcase-Daten. Da liest man in der Regel, dass die Eingangsspannung
nicht positiver als +Ub plus 0.5 V und nicht negativer als GND minus 0.5
V sein darf. Dieses Problem kann hier gar nie eintreten.
Die Teilbilder 10.5 bis 10.8 zeigen die selbe Situation, wenn digitale
CMOS-Schaltkreise symmetrisch mit ±Ub gspiesen werden. In diesem Fall
gilt -Ub für den LOW-Pegel und nicht GND. Der GND-Pegel liegt in der
Mitte von +Ub und -Ub, wenn +Ub und -Ub gleich gross sind. Diese
Logiksituation kommt oft dann vor, wenn eine komplexe Schaltung aus
analogen Schaltkreisen besteht, welche symmetrisch mit ±Ub gespiesen
wird und von digitalen CMOS-Schaltkreisen gesteuert werden. Allerdings
gibt es da auch Interfaceschaltkreise, welche GND-bezogene
Logik-Eingänge und ausgangsseitig nicht potenzialbezogene analoge
CMOS-Schalter enthalten, die in der Lage sind analoge Spannungen
innerhalb der positiven und negativen Betriebsspannung zu schalten. Eine
praktische Anwendung gibt es im Elektronik-Minikurs zum Thema
SC-Tiefpassfilter-Einheit mit
umschaltbaren Grenzfrequenzen.
Man betrachte dazu Bild 5 im Kapitel "Umschaltbare fixe
Grenzfrequenzen (Schema)". Da werden analoge aktive Tiefpassfilter,
welche mit ±5 VDC gespiesen werden, von digital gesteuerten
Analogschaltern (IC:B1,B2,B3,E1,E2,E3) von Logikpegeln mit 5V (HIGH) und
GND-Pegel (LOW) umgeschaltet. Diese Analogswitches vom Typ
DG202B
enthalten die entsprechend notwendigen Interfacefunktionen. Siehe
Blockschema Figure 1 und beachte den Block
"Level Sift/Drive".
Openkollektor schaltet CMOS- oder TTL-Digital-IC
 Quelle: Digi-Key: Sensor-Solutions
Quelle: Digi-Key: Sensor-Solutions
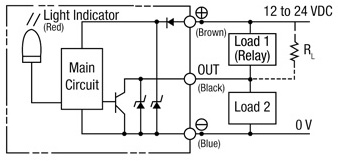
Diese Prinzipschaltung eines eigentlichen Lichtsensors mit Schaltausgang dient als Anschauungsmaterial zu diesem Kapitel. Der Lichtempfänger - im vorliegenden Fall ist es infrarot - erzeugt einen lichtabhängigen Strom. Dieser Strom (die Lichtstärke) wird durch eine Triggerschaltung in Main-Circuit ausgewertet. Oberhalb eines gewissen Pegels erhält der NPN-Transistor Basisstrom. Dies ermöglicht einen Kollektorstrom, ausgehend von einer positiven Betriebsspannung, der durch den Lastwiderstand RL (z.B. ein Relais) zum Kollektor des Transistor fliesst. Der leitende Transistor ermöglich den Stromfluss vom Kollektor zum Emitter nach GND. Uns interessiert zunächst die Pullup-, bzw. die Wired-OR-Funktion und betrachten Bild 11:
Es gibt verschiedene Sensorschaltungen mit Logik-Ausgängen, welche mit
einem NPN-Transistor in Emitterschaltung mit offenem Kollektor
ausgerüstet sind. Eine Openkollektor-Schaltung hat den Vorteil der
sogenannten Wired-OR-Verknüpfung. Der Vorteil besteht darin, dass man
sehr viele solcher Sensoren mit einer Wired-OR-Verknüpfung parallel mit
einem einzigen Pullup-Widerstand (Rpu) schalten kann. Dies erspart eine
Menge Logik-Gatter.
Teilbild 11.1 zeigt eine beliebige Anzahl von Lichtsensoren (SENSOR-1
bis SENSOR-n). Die Openkollektor-Ausgänge (Ua1 bis Uan) sind miteinander
verbunden und mittels eines gemeinsamen Pullup-Widerstand Rpu mit einer
positiven Spannung +Ub2 verbunden. +Ub2 kann dem Wert der
Betriebsspannung +Ub1 entsprechen oder jeden andern Spannungswert
zwischen etwa +1 VDC bis etwas weniger haben, als die maximal zulässige
Kollektor-Emitter-Spannung des Openkollektor-Transistors des Sensors
zulässt (Datenblatt). Wenn einer der Sensor-Transistoren einschaltet und
Uax auf LOW (GND-Pegel) geht, geht Ua ebenfalls auf LOW und ein Alarm
wird beispielsweise ausgelöst. Der HIGH-Pegel (kein Sensor ist aktiv)
entspricht, an Ua unbelastet, der Spannung +Ub2.
Damit man diese Funktionsweise als wired-OR bezeichnen kann, gilt die
negative Logik. In der positiven Logik kodiert der High-Pegel den
Binärwert 1 (HIGH) und der Low-Pegel den Binärwert 0 (LOW). In negativer
Logik stellt der High-Pegel die 0 (LOW) und der Low-Pegel die 1 (HIGH)
dar. Genau das trifft hier in Teilbild 11.1 zu. Teilbild 11.2 zeigt ein
AND-Gatter mit n Eingängen. In negativer Logik ist es ein OR-Gatter mit
n Eingängen. Wenn auch nur ein Eingang auf LOW gesetzt wird, setzt Ua
auf ebenfalls auf LOW. Nur dann wenn alle Eingänge auf HIGH sind, ist
auch Ua auch HIGH. Teilbild 11.3 zeigt die selbe Funktionseigenschaft
aufgeteilt in vier AND-Gatter im Sinne der positiven und als OR-Gatter
im Sinne der negativen Logik. Teilbild 11.4 wiederholt das selbe als
passive wired-OR-Schaltung mit n Eingängen und einem Pullup-Widerstand.
Die Schalter sind die Transistoren in Teilbild 11.1. So erkennt man
leicht, dass diese Schaltung den geringsten Aufwand aufweist.
Zusätzliche Informationen im ELKO findet man im
Digitaltechnik-Grundlagenkurs
Logik-Pegel
Die selbe passive Methode wiederholt in Teilbild 12.1 ist allerdings mit einem Nachteil behaftet, wenn höhere Frequenzen im Spiel sind: Der Quellwiderstand an Ua ist beim HIGH-Pegel alleine durch den Pullup-Widerstand Rpu definiert. Ist ein Schalter (Transistor) eingeschaltet, definiert der sehr niederohmige Kontakt-Widerstand den Quellwiderstand an Ua. Daraus folgt, dass ansteigende Schaltflanken an Ua immer weniger steil sind, als die fallenden, denn aufgeladen wird die unvermeidliche parasitäre Kapazität Cpar (Leiterbahn, Kabel, etc.) an Ua immer langsamer, als sie entladen wird.
Betriebsspannung des Sensor höher als die der Steuerung: Dazu
kommt noch, dass die Betriebsspannung der Steuerung von aussen nicht
zugänglich ist, wie dies Bild 13 zeigt. In den beiden Teilbildern
beträgt die Betriebsspannung des Sensors +12 VDC oder +24 VDC. Die
Steuerung ist, wie es heute üblich ist, TTL-kompatibel, jedoch, weil
meist in HCMOS-Technologie realisiert, sehr hochohmig, wenn noch kein
Pullup- oder Pulldown-Widerstand implemetiert ist. Wir gehen davon aus,
dass dies in Bild 13 der Fall ist. TTL-kompatibel bedeutet, dass der
Eingang auf die definierten Logikpegel an TTL-Ausgängen angepasst ist.
Das bedeutet nicht, dass man keine anern digitalen Signalquellen
anschliessen darf. Sie müssen lediglich die Spannungswerte für logisch
HIGH und LOW einhalten. Im vorliegenden Beispiel ist dies klar gegeben.
In Teilbild 13.1 gehen wir davon aus, dass +Ub nicht stabiliert ist,
weil dies der Sensor auf Grund einer hohen Spannungstoleranz nicht
benötigt. In diesem Fall muss die Spannung im Zustand des HIGH-Pegels am
Eingang der Steuerung mittels einer Zenerdiode mit einer Zenerspannung
von 4.7 V begrenzt werden. Eine Zenerdiode mit 5.1 V könnte schon etwas
zu knapp werden, weil CMOS-Eingänge dürfen nur knapp eine höhere
Spannung haben, als die Betriebsspannung (+5 VDC) beträgt. Damit eine
Zenerdiode vernünftig arbeitet, muss der Z-Strom so gross sein, dass die
Z-Spannung im Sättigungs- und nicht im Knickbereich von Strom und
Spannung liegt. Für kleine 500mW-Zenerdioden liegt dieser Strom im
unteren mA-Bereich. Bei 5 mA beträgt die Verlustleistung bei einer
Z-Spannung von 5 V nur gerade 25 mW. Wenn +Ub = 24 VDC, dann beträgt die
Verlustleistung in R1 120 mW, wenn der Transistor des Sensor
eingeschaltet ist. Bei offenem Transistor ist es weniger. Es genügt ein
kleiner 1/4-Watt-Widerstand für R1 im Wert von 3k9 (+Ub = 24 VDC) oder
1k5 (+Ub = 12 VDC). Wer mehr u.a. über Zenerdioden erfahren möchte,
lese bitte im Elektronik-Minikurs
Z-Diode-Erweiterungskurs und die Bandgap-Referenz.
Die Schaltung in Teilbild 13.2 zeigt eine stabilisierte/geregelte
Betriebsspannung von +Ub = 12 VDC oder +Ub = 24 VDC. In diesem Fall ist
eine Zenerdiode nicht zwingend. Ein Spannungsteiler aus R1 und R2
genügt. Da in beiden Schaltungen ein Querstrom von 5 mA definiert ist,
gelten für R1 die selben Werte für beide Teilbilder. In beiden
Schaltungen liegen beide HIGH-Pegel knapp unterhalb der Betriebsspannung
für die Steuerung von +5 VDC. Diese Dimensionierung ist nur ein
Beispiel. Es kommt immer auch noch darauf an, was das Datenblatt der
Steuerung über die maximale Eingangsspannung und über den
Eingangswiderstand aussagt.
Vielleicht ein Problem beim Einschalten der Steuerung!: Wenn die
Spannung am Eingang der Steuerung um mehr als 0.5 V grösser ist als die
Betriebsspannung und der Eingang ist IC-intern ungenügend oder gar nicht
geschützt, kann es zu einem Latchup-Effekt kommen, der zur Zerstörung
der Eingangsbeschaltung der Steuerung führt. Falls die Steuerung aus
einem einzigen Chip besteht, ist alles defekt. Dies kann dann z.B.
passieren, wenn der Sensor-Transistor offen ist und eine Spannung am
Kollektor anliegt, die einen Stromfluss zum Eingang der Steuerung
ermöglicht und in diesem Zustand die Spannungsversorgung der Steuerung
eingeschaltet wird. Ein Latchup-Effekt lässt sich allerdings mit einem
Vorwiderstand Rv in Serie zum Eingang der Steuerung vermeiden. Der Strom
in den Eingang muss dabei derart reduziert sein, so dass es in der
CMOS-Eingangsstufe sicher keinen Latchup-Effekt auslösen kann. Falls
dieser Eingang jedoch einen Überspannungsschutz zum Zweck enthält den
Latchup-Effekt zu vermeiden, ist Rv (etwa im 10k-Ohm-Bereich)
verzichtbar, ausser es wird, wie bei der HCMOS-Digital-IC-Familie einen
maximalen Eingangsstrom angegeben, der nicht überschritten werden darf.
In diesem Fall muss man sicher stellen, dass +Ub und R1 diesen
Worstcase-Strom nie überschreiten kann. Ist das ohne Rv nicht
gewährleistet, muss man diesen einfügen.
Dieser Stromfluss kommt zustande, wenn die Eingangsspannung um den
Betrag einer Dioden-Schwellenspannung von etwa 0.7 V grösser ist als die
Betriebsspannung (diese kann 0 VDC haben!). Ein zu hoher Strom kann
dabei eine integrierte Schutzschaltung beschädigen oder wenn so eine
nicht vorhanden oder vorhanden und schlecht dimensioniert ist, einen
Latchup-Effekt auslösen. Mehr dazu liest man im Kapitel "Der
Latchup-Effekt" im Elektronik-Minikurs
Der analoge Schalter II
und im letzten Kapitel hier gibt es noch zwei spezielle Links.
Kritik am Titelbild
zu diesem Kapitel:
Dieses kleine Titelbild zeigt gleich zwei Möglichkeiten der
Relaissteuerung. Die Steuerung arbeitet nichtinvertierend, wenn das
Relais (Load-1) im Kollektorkreis des internen Transistors angeschlossen
ist. Im aktiven Zustand (Light = ON) des Sensors ist das Relais
angezogen. Im Zustand der invertierenden Funktion, liegt das Relais
(Load-2) parallel zu Kollektor und Emitter des NPN-Transistors. Das
Relais zieht an im passiven Zustand des Sensors. Der Transistor ist
offen. Von der Betriebsspannung durch den Widerstand
RL und durch das Relais (Load-2) fliesst der Strom
nach GND und das Relais zieht an. Nachteilig an dieser Schaltung ist,
dass die Nennspannung der Relaisspule (Load-2) einen niedrigeren Wert
als die Betriebsspannung der Schaltung haben muss, weil die Relaisspule
nur eine Teilspannung von ihr erhält. RL und
Relaispule arbeiten jetzt als Spannungsteiler. Im ausgeschalteten
Zustand des Relais (Transistor leitend) muss die gesamte
Betriebsspannung über RL liegen und das bedeutet
unnötig hohe Verlustleistung im ausgeschalteten Zustand des Relais. Dies
kann dann zu Problemen führen, wenn ein leistungsstarkes Relais mit
relativ hoher Spulenleistung zum Einsatz kommt.
Dieses Problem wird in den Teilbildern 15.1 und 15.2 getrennt
dargestellt, um es deutlicher hervorzuheben. An Stelle von
RL steht Rv für Vorwiderstand. Gerade bei einer
relativ hohen Betriebsspannung (24 VDC) muss Rv dann viel Leistung
verkraften, wenn das Relais ausgeschaltet ist und so der ganze Strom via
Kollektor-Emitter nach GND fliesst. Teilbild 15.3: Will man diesen Murks
nicht, geht das ganz einfach mit dem zusätzlichen NPN-Transistor T der
das Schalten des Relais übernimmt. Auf diese Weise muss Rv (hier nur als
R bezeichnet) wegen der Stromverstärkung von T nur eine sehr geringe
Leistung verkraften. Die Freilauf-Dioden in den Teilbildern 15.1 und
15.2 zum Schutz des internen Transistors sind für den Einsatz eines
beliebigen Sensors gezeichnet, welche keine internen Schutzmassnahmen
aufweisen.
Betreffs Thema "Schalten mit Transistoren" am Beispiel eines
Schaltmoduls, das der genannte Sensor übrigens auch ist, empfehle ich
den Elektronik-Minikurs
Schalten und Steuern mit Transistoren I.
Zum Schluss: Was ist die Schottky-Diode und was ist ein Latchup-Effekt?
Über Schottky-Dioden liest man etwas in:
Über Latchup-Effekte liest man etwas in:
Der Latchup-Effekt ist auch kurz und informativ in der 11. Auflage (9. Auflage) des Buches HALBLEITERSCHALTUNGSTECHNIK von Tietze/Schenk auf Seite 644 (Seite 215) beschrieben.